Natura Machina: Teenage Meadow
Abstract
Natura Machina: Teenage Meadow symbiotically combines plants and robotics in a harmonious relationship as part of a long-term goal of creating art that is simultaneously a new life form that can exist in nature. The work consists of silicone rubber elastomer, air pumps, sensors, and reindeer moss lichen. It inflates and deflates rhythmically like the movement of breathing. Similar to a teenager’s nature, it will react to a stranger’s presence, especially when touched.

Background
The work explores the symbiotic relationship between Nature and Machine. The 21st century will challenge pre-existing distinctions between nature and technology. How might the boundary between biology and technology begin to blur? Can we create a platform that is mutually beneficial for both robot and living things?
Artists consistantly merge art and technology to predict, explore, and shape the future. In 1995, Ken Goldberg and Joseph Santarromana created The Telegarden [3], a robotic art installation that allowed anyone on the Internet to inter- act with a remote garden. Users tele-operated a robot arm to plant, water, and monitor the progress of living plants. In Soichiro Mihara’s Blank Project #3 – A Corner of the Cosmos [4], a group of singing and dancing moss balls powered by microbial fuel cells (MFC) envisage a future where moss-generated electricity is used to power robots. Caravel [1], built by Ivan Henriques, is a symbiotic machine powered by anaerobic bacteria and organic components in the water, which in return drifts through the polluted water to clean and purify water. These machines are hybrid forms situated between living organisms and machines and they gesture toward an evolutionary vector between machines and nature.
In prior work I created Natura Machina: Newborn, the first of its kind, is as pneumatic sculpture made with soft robotics and moss. The movement of the sculpture simulates a baby’s breathing pattern. The piece was presented as a fictional species from a dystopian future:
After “The Last Day”, the world of Artificial Intelligence Alexa and Millennial Homo Sapiens vanished. Hidden forces transformed the Earth’s climate, with ameliorative consequences . Natura Machina - a hybrid symbiosis between machine and nature was born.
The Newborn piece evokes viewers to think ecologically, and seeks to enhance the environmental sensibility of the society. In this work we present Natura Machina: Teenage Meadow, derived from Newborn, but 9 times bigger in its area size and focused more on the interconnected relationship among bot, botany and human body.
Concept
Natura Machina: Teenage Meadow is an interactive pneumatic sculpture that embraces elements of the natural world and the human form. As a mound of green reindeer moss lichen that swells and contracts like a breathing lung through hidden, robotically turned gears, this work explores the interplay of interior versus exterior spaces relating to the body and nature. Singular and concrete meaning-distinctions—machine, plants, people— dissolve along a single plane; triggered by the presence, and deactivated in the viewer’s absence, Natura Machina: Teenage Meadow highlights the context structuring compositions so that our role becomes nature’s role for the body. We are such intimate moments existing as one.

Technical Detail
Natura Machina: Teenage Meadow consists of a 32 inch - diameter dome-shape pneumatic actuator, pumps, control electronics, touch sensor, and reindeer moss lichen.
Actuator
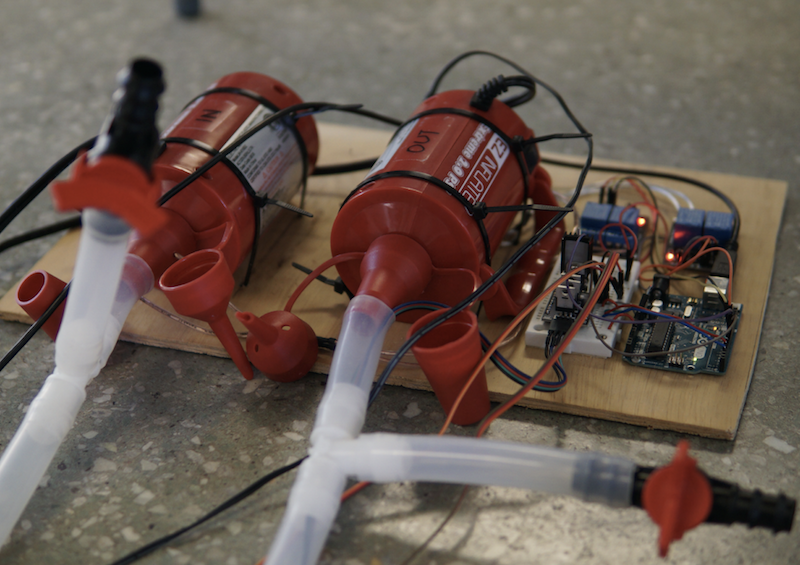
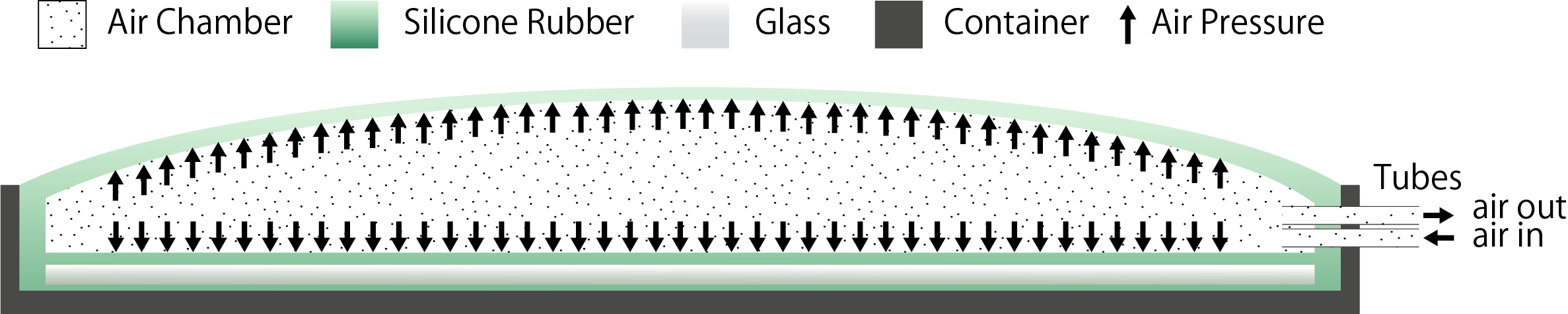
Natura Machina: Teenage Meadow utilizes the techniques commonly found in the DIY soft robotics field [2] to con- struct the pneumatic actuator, which is the shape-changing “body”. By combining materials with different elastic behavior, the “stretchy” material will expand more than the “rigid” material when the actuator is pressurized [5]. In our case the “rigid” material is a piece of 3mm thick 80cm wide glass, and the “stretchy” material is layers of silicone rubber elastomer wrapped around the glass. The process of making the actuator was through series of steps of casting and masking. We used a sheet of paper to separate two layers of silicone rubber to create the air chamber. To inflate and deflate the actuator we connected two electrical pumps through silicone tubes(see Figure 3). One pump pushes the air in and the other draws the air out. The pumps are controlled by an Arduino and solid state relays. In addition, a differential pressure sensor was installed to monitor and regulate the internal pressure of the actuator.
Moss
We chose moss/lichen to be our co-living plant because it can live without soil. Reindeer moss lichen is particularly interesting because of it’s coral-like bushy growth structure. The vegetation expands and compresses along with the silicone rubber elastomer surface when the actuator inflates and deflates. In addition, this fruticose lichen itself is also formed from a symbiotic relationship of fungi and plants (algae).
Touch Sensors
Underneath the moss we embedded copper wires to serve as the capacitive touch sensors. When a viewer touches the moss, the sensor detects the electrical capacitance change due to the human body. While touched, the artwork enters a rapid breathing mode. As long as the moss remains moisturized, the sensing area covers the whole surface.
References
[1] Ivan Henriques. 2016. Caravel. (2016). https://ivanhenriques.com/works/caravel/
[2] D. Holland, E. J. Park, P. Polygerinos, G. J. Bennett, and C. J. Walsh. 2014. The Soft Robotics Toolkit: Shared Resources for Research and Design. Soft Robotics 1, 3 (2014), 224–230.
[3] Joseph Santarromana Ken Goldberg. 1995. The Telegarden. (1995). https://goldberg.berkeley.edu/garden/Ars/
[4] Soichiro Mihara. 2016. blank project 3 - a corner of the cosmos. (2016). https://kenpoku-art.jp/en/artworks/d07/
[5] Panagiotis Polygerinos, Bobak Mosadegh, and Alexandre Campo. 2014. PneuNets Bending Actuators. (2014). https://softroboticstoolkit. com/book/pneunets-bending-actuator/.
Date: Dec, 2018
Author: Kuan-Ju Wu, Andrew McGregor